import time
from pathlib import Path
import matplotlib.pyplot as plt
import scienceplots # noqa: F401
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from IPython.display import HTML
from matplotlib.animation import FuncAnimation
from torchdiffeq import odeint_adjoint as odeint
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
current_nb_dir = Path(".").resolve()
plt.style.use(['science','no-latex'])Breathing Ellipse
Let’s build a model to learn a velocity field that governs the motion of points on a 2D curve such that the overall shape follows a specific geometric evolution. As an example, let’s consider an ellipse that expands and contracts over time, simulating a breathing motion whose aspect ratio changes according to the following function:
\[ \beta(t) = \frac{1}{2}\left[(\beta_0 + \frac{1}{\beta_0}) + (\beta_0 - \frac{1}{\beta_0})\cos(\omega t) \right]; \omega = \frac{2\pi}{T} \quad t = 0, 1, ..., t_f \\ \]
Here, the aspect ratio \(\beta(t)\) oscillates from \(\beta_0\) to \(\frac{1}{\beta_0}\) and back, creating a breathing effect, over the time period \(T\). Note the following key time points and their corresponding aspect ratios in the breathing cycle:
| Time \(t\) | Aspect Ratio \(\beta(t)\) |
|---|---|
| \(0\) | \(\beta_0\) |
| \(T/4\) | \(\frac{1}{2}(\beta_0 + \frac{1}{\beta_0})\) |
| \(T/2\) | \(\frac{1}{\beta_0}\) |
| \(3T/4\) | \(\frac{1}{2}(\beta_0 + \frac{1}{\beta_0})\) |
| \(T\) | \(\beta_0\) |
Assumptions & Expected Results
- The area of the ellipse is conserved over time.
- Conservation of topology (no crossing of trajectories)
- Each point on the curve maps to a new position at each time step, following the velocity field defined by the Neural ODE.
- Find time-dependent vector field that governs the motion of points on the curve.
- Model should show spatial resolution invariance (the same curve should be obtained regardless of the number of points sampled on the curve)
- Model should show time resolution invariance (the same curve should be obtained regardless of the number of time steps used to sample the curve)
Implementation
Our goal is to learn a function \(f_{\theta}(X, t)\) that defines the velocity field governing the motion of points on the curve.
\[ \frac{dX}{dt} = f_{\theta}(X, t) \]
- We use a neural network to learn the function \(f_{\theta}(X, t):\mathbb{R}^2 \times \mathbb{R} \rightarrow \mathbb{R}^2\), mapping the current position of points on the curve and time to a velocity vector.
- Then an ODE solver (e.g.,
torchdiffeq.odeint) will be used to compute the output \(X(T)\) from the input \(X(0)\), given the current velocity field defined by the neural network. - Loss function: Mean squared error between the predicted curve at time \(T\) and the true curve at time \(T\).
\[ \mathcal{L}(\theta) = \frac{1}{NK} \sum_{i=1}^{N} \sum_{k=1}^{K} \| X_i^{\theta}(t_k) - X_i^{\text{true}}(t_k) \|^2 \]
Data Generation
def generate_truth(
beta_0, omega, t_final, num_locus_pts=64, num_time_steps=32
):
theta = torch.linspace(0, 2 * torch.pi, num_locus_pts).to(device)
time_values = torch.linspace(0, t_final, num_time_steps).to(device)
xi = 1.0 # Area constant
# beta(t) using your sinusoidal function
a = beta_0 + (1 / beta_0)
b = beta_0 - (1 / beta_0)
# coeff = (1 - beta0**2) / (beta0 * torch.sin(torch.tensor(omega * T)))
beta_t = 0.5 * (a + (b * torch.cos(omega * time_values)))
ellipses = []
for b in beta_t:
x = xi * torch.sqrt(b) * torch.cos(theta)
y = xi * (1 / torch.sqrt(b)) * torch.sin(theta)
ellipses.append(torch.stack([x, y], dim=1))
return time_values, torch.stack(ellipses)BETA_0 = 2.0
T_PERIOD = 1.0
T_FINAL = 1.5
NUM_TIME_STEPS = 32 # from 0 to T_FINAL
NUM_LOCUS_POINTS = 128
OMEGA = 2.0 * torch.pi / T_PERIOD
time_values, ellipses = generate_truth(
BETA_0, OMEGA, T_FINAL, NUM_LOCUS_POINTS, NUM_TIME_STEPS
)
X_mean = ellipses.mean(dim=(0, 1))
X_std = ellipses.std(dim=(0, 1)) + 1e-06
t_min = time_values.min()
t_max = time_values.std()
print(f"Time Values:\n{time_values}\n") # should list from 0 to T_FINAL
print("Ellipses:")
print(f" Shape: {ellipses.shape}") # (NUM_TIME_STEPS, NUM_LOCUS_POINTS, 2)
print(f" Dtype: {ellipses.dtype}")
print(f" Mean: {ellipses.mean()}")
print(f" Mean: {ellipses.std()}")Time Values:
tensor([0.0000, 0.0484, 0.0968, 0.1452, 0.1935, 0.2419, 0.2903, 0.3387, 0.3871,
0.4355, 0.4839, 0.5323, 0.5806, 0.6290, 0.6774, 0.7258, 0.7742, 0.8226,
0.8710, 0.9194, 0.9677, 1.0161, 1.0645, 1.1129, 1.1613, 1.2097, 1.2581,
1.3065, 1.3548, 1.4032, 1.4516, 1.5000], device='cuda:0')
Ellipses:
Shape: torch.Size([32, 128, 2])
Dtype: torch.float32
Mean: 0.004255517851561308
Mean: 0.7516494989395142Training
NN Model for velocity field
The model should take Input: [x, y, t] and then Output: [vx, vy]
LEARNING_RATE = 0.005
NUM_EPOCHS = 2500
PRINT_FREQ = 250 # in epochsclass VelocityField(nn.Module):
def __init__(self, feature_stats: dict = None):
super().__init__()
feature_stats = feature_stats or {}
x_mean_ = feature_stats.get("X_mean", torch.zeros(2))
x_std_ = feature_stats.get("X_std", torch.ones(2))
t_min_ = feature_stats.get("t_min", torch.tensor(0.0))
t_max_ = feature_stats.get("t_max", torch.tensor(1.0))
self.register_buffer("X_mean", x_mean_)
self.register_buffer("X_std", x_std_)
self.register_buffer("t_min", t_min_)
self.register_buffer("t_max", t_max_)
# Input: [x, y, t] -> Output: [vx, vy]
self.net = nn.Sequential(
nn.Linear(3, 32),
nn.Tanh(),
nn.Linear(32, 64),
nn.Tanh(),
nn.Linear(64, 2),
)
def normalize_state(self, X):
return (X - self.X_mean) / self.X_std
def normalize_time(self, t):
return (t - self.t_min) / self.t_max
def denormalize_state(self, X):
return X * self.X_std + self.X_mean
def forward(self, t, h):
# Normalise
t_norm = self.normalize_time(t)
h_norm = self.normalize_state(h)
# h: [Batch, 2] | t: scalar
# Map t to the same shape as the batch
# t_vec = torch.full((h_norm.shape[0], 1), t_norm, device=h_norm.device)
t_vec = torch.ones(h_norm.shape[0], 1).to(device) * t_norm
input_data = torch.cat([h_norm, t_vec], dim=1)
dx_dt = self.net(input_data) # normalised output
scale = self.X_std / (self.t_max - self.t_min)
dx_dt = scale * dx_dt # to physical space
return dx_dtvelocity_function = VelocityField(
feature_stats={
"X_mean": X_mean,
"X_std": X_std,
"t_min": t_min,
"t_max": t_max,
}
).to(device)
optimizer = optim.Adam(velocity_function.parameters(), lr=LEARNING_RATE)
criterion = nn.MSELoss() # Define the loss function
t_start = time.time()
t_0 = time.time()
loss_values = []
cum_abs_deviations = []
lr_values = []
init_ellipse = ellipses[0] # Initial Ellipse at beta0
for i in range(NUM_EPOCHS):
optimizer.zero_grad()
# Forward pass: Integrated path through the ODE solver
pred_traj = odeint(
velocity_function, init_ellipse, time_values, method="rk4"
)
# Loss: MSE between predicted trajectories and true snapshots
loss = criterion(pred_traj, ellipses)
loss.backward()
optimizer.step()
loss_values.append([i, loss.item()])
lr_values.append([i, optimizer.param_groups[0]["lr"]])
if i % (PRINT_FREQ) == 0:
with torch.no_grad():
cum_abs_deviations.append(
[i, torch.abs(pred_traj - ellipses).sum().item()]
)
epoch_str = f"Epoch {i + 1}/{NUM_EPOCHS}"
loss_str = f"Loss: {loss.item():.8f}"
elps_t = f"elapsed time: {time.time() - t_0:.2f}"
print(f"{epoch_str} | {loss_str} | {elps_t}")
t_0 = time.time()
print(f"training completed in {time.time() - t_start:.2f}s")
# Saving the model
model_fp = current_nb_dir.joinpath("be_v_field_model.pth") # Save model
torch.save(velocity_function.state_dict(), model_fp)
print(f"Model saved to {model_fp}")Epoch 1/2500 | Loss: 0.13277298 | elapsed time: 1.05
Epoch 251/2500 | Loss: 0.02521179 | elapsed time: 122.21
Epoch 501/2500 | Loss: 0.00903440 | elapsed time: 125.01
Epoch 751/2500 | Loss: 0.00935643 | elapsed time: 125.73
Epoch 1001/2500 | Loss: 0.00256929 | elapsed time: 124.72
Epoch 1251/2500 | Loss: 0.00455607 | elapsed time: 121.88
Epoch 1501/2500 | Loss: 0.00214685 | elapsed time: 126.24
Epoch 1751/2500 | Loss: 0.00062523 | elapsed time: 124.08
Epoch 2001/2500 | Loss: 0.00136207 | elapsed time: 124.86
Epoch 2251/2500 | Loss: 0.00057780 | elapsed time: 124.93
training completed in 1243.93s
Model saved to /home/rajesh/work/ml/neural_ode/breathing_ellipse/be_v_field_model.pthVisualization of training history
loss_values = np.array(loss_values)
lr_values = np.array(lr_values)
cum_abs_deviations = np.array(cum_abs_deviations)
fig, axs = plt.subplots(1, 2, figsize=(16, 8))
plt.rcParams["font.size"] = 15.0
axs[0].plot(
loss_values[:, 0],
loss_values[:, 1],
marker="*",
label="Loss",
)
axs[0].set_ylabel("MSE Loss")
axs[1].plot(
cum_abs_deviations[:, 0],
cum_abs_deviations[:, 1],
marker="s",
label="Cum_abs_deviation",
)
axs[1].set_ylabel("Cumulative Absolute Error")
# axs[2].plot(
# lr_values[:, 0],
# lr_values[:, 1],
# marker="*",
# label="Learning Rate",
# )
for a_ax in axs:
a_ax.set_xlabel("Epoch")
a_ax.set_yscale("log")
a_ax.grid()
plt.tight_layout()
plt.show()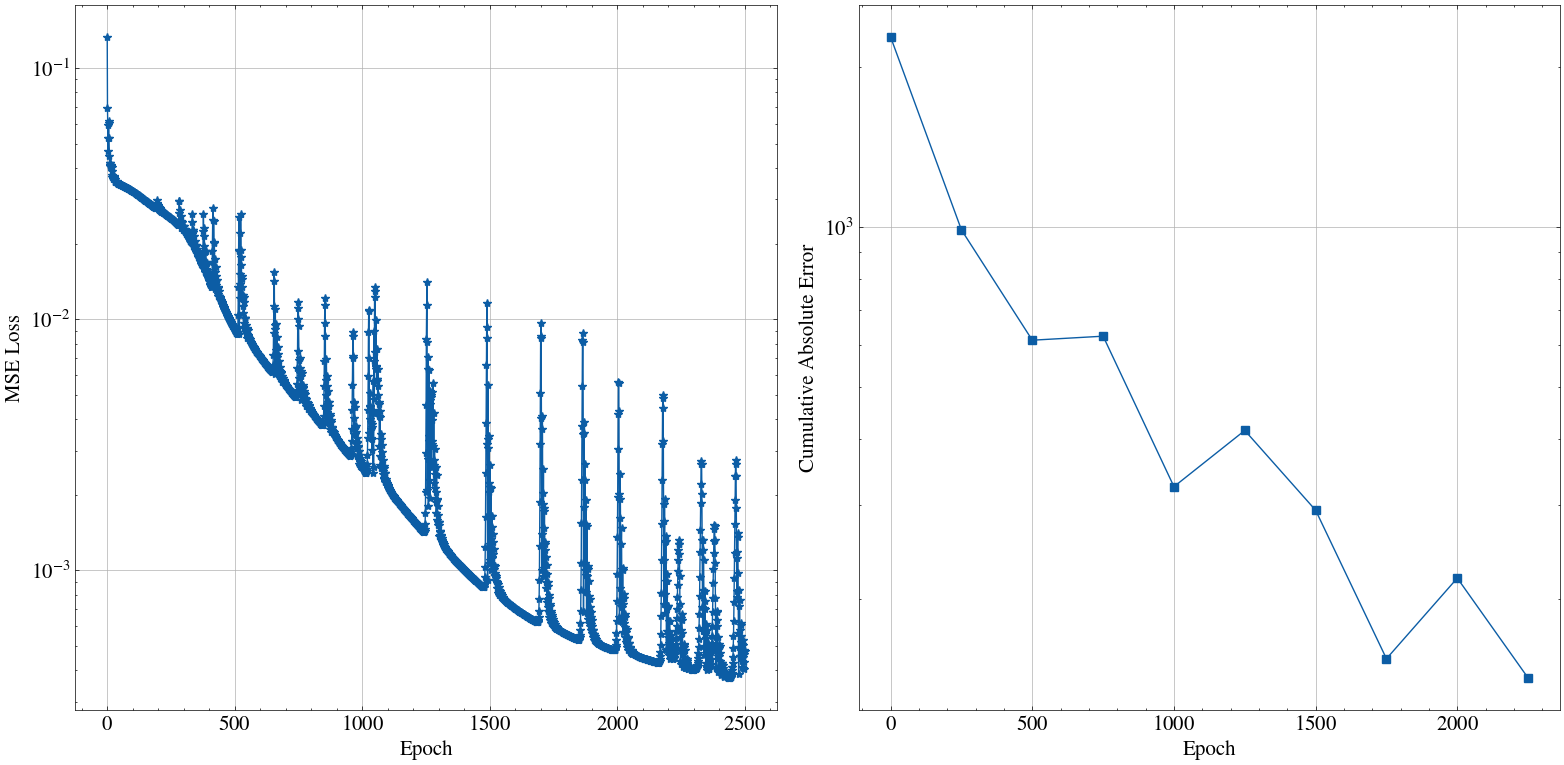
Inference
if not model_fp.exists():
raise FileNotFoundError(f"Model file {model_fp}")
print(f"Loading model from {model_fp} ...")
model_inf = VelocityField().to(device)
model_inf.load_state_dict(torch.load(model_fp))
model_inf.eval()
print("Model loaded successfully.")Loading model from /home/rajesh/work/ml/neural_ode/breathing_ellipse/be_v_field_model.pth ...
Model loaded successfully.def plot_inference(
pred_traj: torch.Tensor,
true_traj: torch.Tensor,
t_val: torch.Tensor,
fp_out=None,
):
pred_traj = pred_traj.cpu().numpy()
true_traj = true_traj.cpu().numpy()
num_t, num_p, _ = pred_traj.shape
fig, axs = plt.subplots(figsize=(6, 6), dpi=80)
# # Create a line object
(line,) = axs.plot([], [], "r-", lw=2)
# --- Create static limits once ---
axs.set_xlim(-3, 3)
axs.set_ylim(-3, 3)
axs.set_aspect("equal")
axs.grid(True, alpha=0.3)
title = axs.set_title("Breathing Ellipse | t = 0.00")
# Plot Velocity Field
xx, yy = np.meshgrid(np.linspace(-3, 3, 15), np.linspace(-3, 3, 15))
grid = torch.tensor(
np.stack([xx.flatten(), yy.flatten()], axis=1), dtype=torch.float32
).to(device)
def init():
line.set_data([], [])
return line, title
def _add_line(arr, frm, **plot_kwargs):
x = arr[frm, :, 0]
y = arr[frm, :, 1]
x_closed = np.append(x, x[0])
y_closed = np.append(y, y[0])
(line,) = axs.plot(x_closed, y_closed, **plot_kwargs)
return line
def update(frame):
axs.clear()
t_val_i = t_val[frame].item()
line = _add_line(
pred_traj,
frame,
color="red",
linestyle="solid",
lw=2,
label="Predicted Ellipse",
)
line = _add_line(
true_traj,
frame,
color="b",
linestyle="solid",
lw=2,
label="True Ellipse",
)
axs.set_title(f"Breathing Ellipse | Time = {t_val_i:.3f} sec")
with torch.no_grad():
v = model_inf(torch.tensor(t_val_i).to(device), grid).cpu().numpy()
axs.quiver(xx, yy, v[:, 0], v[:, 1], color="lightgray")
axs.grid(True, alpha=0.3)
axs.set_aspect("equal")
axs.legend(loc="upper right")
return line, title
ani = FuncAnimation(
fig, update, frames=num_t, init_func=init, interval=50, blit=True
)
plt.close(fig)
if fp_out is not None:
ani.save(fp_out, writer='ffmpeg', fps=15)
else:
return HTML(ani.to_jshtml())Predict with same time steps and spatial resolution as training
new_num_locus_points = NUM_LOCUS_POINTS
new_num_time_steps = NUM_TIME_STEPS
t_values_inf, ellipses_inf = generate_truth(
BETA_0,
OMEGA,
T_FINAL,
new_num_locus_points,
new_num_time_steps,
)
init_ellipse = ellipses_inf[0] # Initial Ellipse at beta0
t_fine = torch.linspace(0, T_FINAL, new_num_time_steps).to(device)
with torch.no_grad():
# You can even use a higher precision solver for inference
prediction_trajectory = odeint(
model_inf, init_ellipse, t_fine, method="dopri5"
)
plot_inference(
prediction_trajectory,
ellipses_inf,
t_values_inf,
fp_out=current_nb_dir.joinpath("case_same_n_same_t.mp4"),
)Predict with finer time steps (4 times more), but same spatial resolution as training
new_num_locus_points = NUM_LOCUS_POINTS
new_num_time_steps = NUM_TIME_STEPS * 4
t_values_inf, ellipses_inf = generate_truth(
BETA_0,
OMEGA,
T_FINAL,
new_num_locus_points,
new_num_time_steps,
)
init_ellipse = ellipses_inf[0] # Initial Ellipse at beta0
t_fine = torch.linspace(0, T_FINAL, new_num_time_steps).to(device)
with torch.no_grad():
# You can even use a higher precision solver for inference
prediction_trajectory = odeint(
model_inf, init_ellipse, t_fine, method="dopri5"
)
plot_inference(
prediction_trajectory,
ellipses_inf,
t_values_inf,
fp_out=current_nb_dir.joinpath("case_same_n.mp4"),
)Predict with same time steps, but coarser spatial resolution as training
new_num_locus_points = NUM_LOCUS_POINTS // 6
new_num_time_steps = NUM_TIME_STEPS
t_values_inf, ellipses_inf = generate_truth(
BETA_0,
OMEGA,
T_FINAL,
new_num_locus_points,
new_num_time_steps,
)
init_ellipse = ellipses_inf[0] # Initial Ellipse at beta0
t_fine = torch.linspace(0, T_FINAL, new_num_time_steps).to(device)
with torch.no_grad():
# You can even use a higher precision solver for inference
prediction_trajectory = odeint(
model_inf, init_ellipse, t_fine, method="dopri5"
)
plot_inference(
prediction_trajectory,
ellipses_inf,
t_values_inf,
fp_out=current_nb_dir.joinpath("case_same_t.mp4"),
)True velocity field derivation
\[ \dfrac{x^2}{a(t)^2} + \dfrac{y^2}{b(t)^2} = 1 \\ \]
Assuming the ellipse is centered at the origin, parametrized by the angle \(\theta \in [0, 2\pi)\), the coordinates of points on the ellipse can be expressed as:
\[ x(t, \theta) = a(t) \cos{\theta} \\ y(t, \theta) = b(t) \sin{\theta} \]
Where \(a(t)\) and \(b(t)\) are the semi-major and semi-minor axes of the ellipse at time \(t\). The aspect ratio \(\beta(t)\) is defined as:
\[ \beta(t) = \frac{a(t)}{b(t)} \\ \beta(0) = \beta_0 \\ \beta(T) = \frac{1}{\beta_0} \]
As the area of the ellipse is conserved, we have:
\[ \begin{align*} A &= \pi a(t) b(t) = \text{constant} \\ \Rightarrow a(t) b(t) &= A / \pi = \xi ^ 2 \\ \Rightarrow a(t) &= \xi \sqrt{\beta(t)} \\ \Rightarrow b(t) &= \frac{\xi}{\sqrt{\beta(t)}} \\ x(t, \theta) &= \xi \sqrt{\beta(t)} \cos{\theta} \\ y(t, \theta) &= \frac{\xi}{\sqrt{\beta(t)}} \sin{\theta} \\ \end{align*} \]
Differentiating the coordinates with respect to time to get the velocity field:
\[ \begin{align*} \frac{dx}{dt} &= \frac{d}{dt} (\xi \sqrt{\beta(t)} \cos{\theta}) \\ &= \xi \cos{\theta} \frac{d}{dt} \sqrt{\beta(t)} \\ &= \frac{\xi}{2} \cos{\theta} \frac{\beta'(t)}{\sqrt{\beta(t)}} \\ \Rightarrow \frac{dx}{dt} &= \frac{x}{2} \frac{\beta'(t)}{\beta(t)} \\ \end{align*} \]
Similarly for \(y\):
\[ \begin{align*} \frac{dy}{dt} &= \frac{d}{dt} \left( \frac{\xi}{\sqrt{\beta(t)}} \sin{\theta} \right) \\ &= -\frac{\xi}{2} \sin{\theta} \frac{\beta'(t)}{\beta(t)\sqrt{\beta(t)}} \\ \Rightarrow \frac{dy}{dt} &= -\frac{y}{2} \frac{\beta'(t)}{\beta(t)} \end{align*} \]
Hence, the velocity field governing the motion of points on the curve can be expressed as:
\[ \begin{align*} \frac{d}{dt} \begin{pmatrix} x \\ y \end{pmatrix} &= \alpha(t) \begin{pmatrix} x \\ -y \end{pmatrix} \\ &= \frac{\beta'(t)}{2\beta(t)} \begin{pmatrix} x \\ -y \end{pmatrix} \end{align*} \]
The neural ODE should learn this time-varying velocity field that governs the motion of points on the curve, allowing it to reconstruct the breathing ellipse dynamics from the observed data.
_TODO
Question 1: What to pass as input to the velocity field?
Option: State Augmentation
Option1 — Augment with velocity: State = [x, y, dx/dt, dy/dt] Network predicts [dvx/dt, dvy/dt] (acceleration) System is 2nd order, now fully Markovian
Option2 — Augment with a phase variable φ: State = [x, y, φ] Add a learned or fixed oscillator: dφ/dt = ω (known or learned) Network: d[x,y]/dt = f(x, y, φ, θ) φ distinguishes expansion vs contraction phase
Question 2: Spatial/Geometric Structure
Option A: Fourier Descriptor Encoding
- Check with different solvers
Train with rk4, infer with dopri5
Compare trajectories — does adaptive stepping help?
Try euler method — watch it diverge!
for method in ["euler", "midpoint", "rk4", "dopri5"]: pred = odeint(model, init, t, method=method)
- Adjoint vs non-adjoint
- from torchdiffeq import odeint, odeint_adjoint
- Train same model both ways
- Profile memory usage — this is the whole point of adjoint
- from torchdiffeq import odeint, odeint_adjoint
- The autonomous vs non-autonomous experiments
- Train Model A: f(h, t) ← with explicit t
- Train Model B: f(h) ← without t
- Compare on the breathing ellipse
- Model B should struggle — you’ll see WHY t matters here
- Time horizon extrapolation, go beyond (training) times
- Perturb initial conditions, see if it can still recover the breathing pattern